
Beschreibung
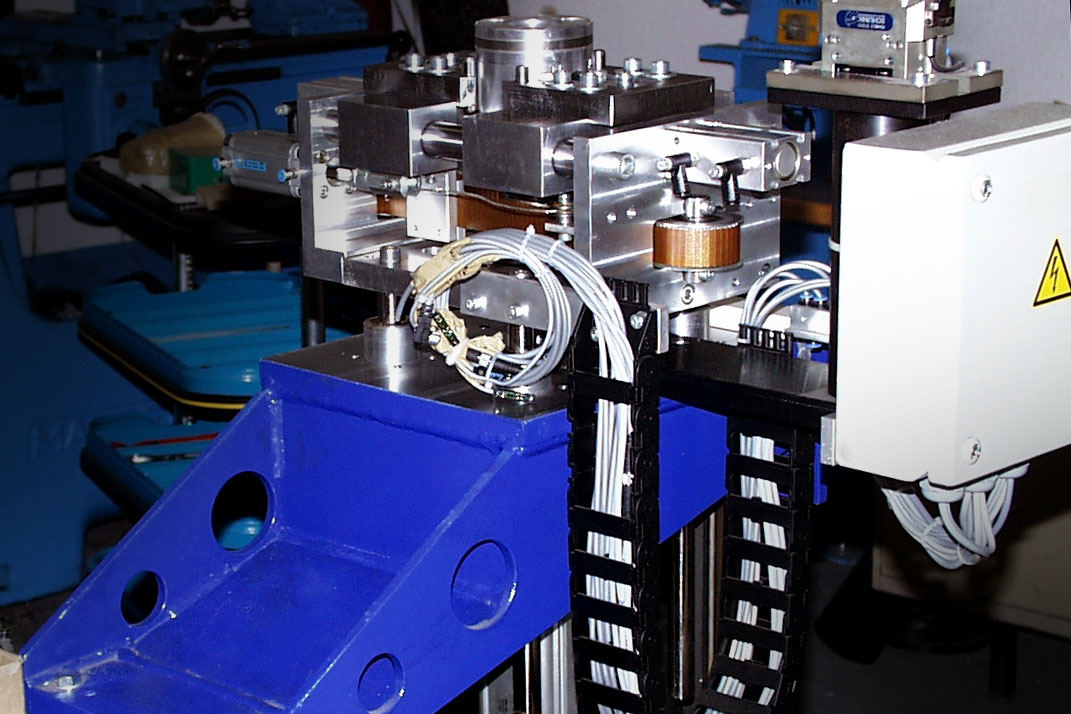
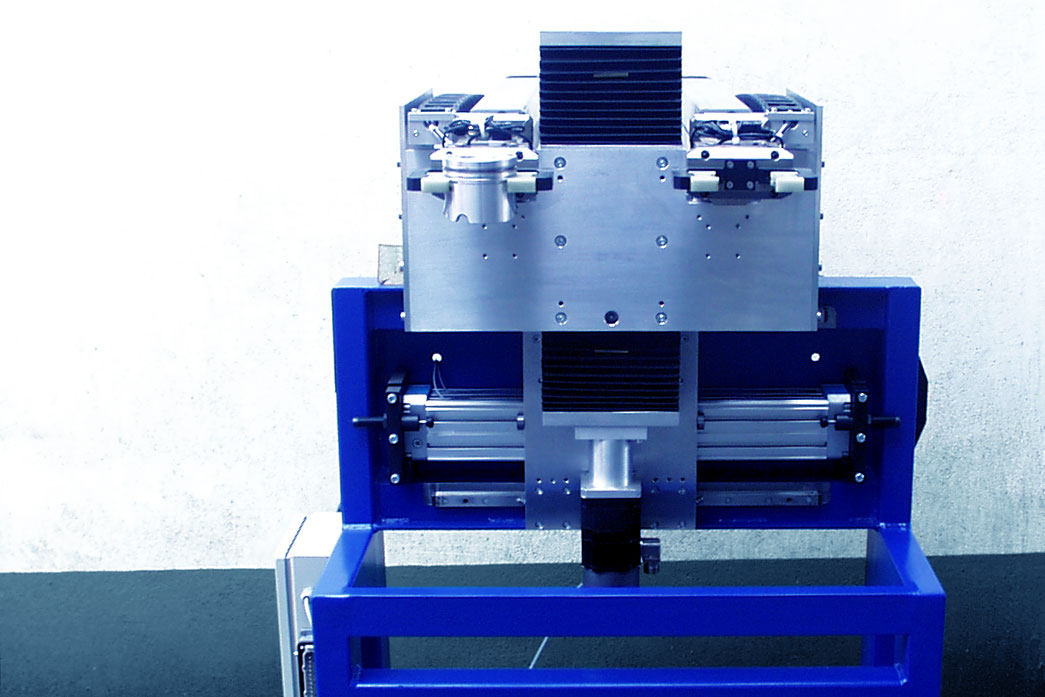
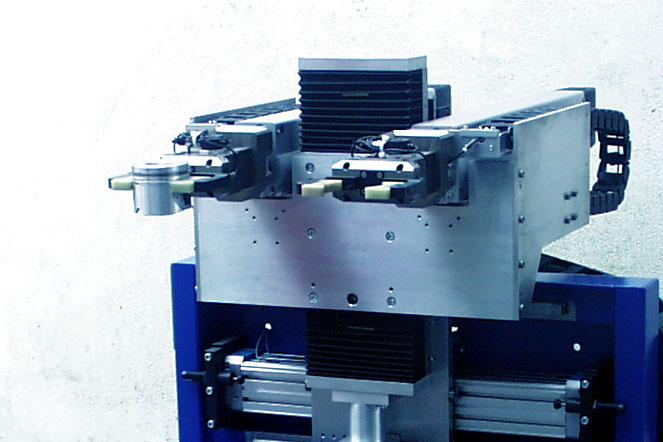
Spezifischer Handhabungsroboter für verschiedene Kolben mit zwei parallel arbeitenden Achsen für die Ein- und Ausbringung der Kolben in die CNC-Werkzeugmaschine. Eine montierte Aufnahmekonsole innerhalb der Werkzeugmaschine mit Zentriereinrichtung realisiert die hochgenaue Übergabe und Rücknahme an und von der CNC-Achse der Werkzeugmaschine. Die unterschiedlichen Kolbentypen werden mittels mobilen Datendatenträgern automatisch erkannt.